Обновление: 01.09.05
© EasyStudio: 01.09.05
easystd@gmail.com
 Рассмотрим схему построения структуры данных, которая задаёт модель
пространственного механизма, на конкретно взятом примере – рис. справа.
Рассмотрим схему построения структуры данных, которая задаёт модель
пространственного механизма, на конкретно взятом примере – рис. справа.
Далее будем обозначать элементы структуры данных следующими идентификаторами:
- Элемент СД, соответствующий звену механизма - MechLink;
- Элемент СД, соответствующий отрезку или составной части звена - MSubLink;
- Элемент СД, соответствующий кинематической паре механизма - MechPair.
Ниже приводится схема связей между основными элементами структуры данных, задающей модель механизма (представленного на рис. выше):
Из представленной схемы видно, что каждый из объектов звена MechLink содержит список указателей на его составные элементы – подзвенья MSubLink. Каждое подзвено соответствует некоторой структурной точке его звена, и может быть либо доступным для соединения с парой, либо недоступным. Если подзвено соединено с парой, то оно содержит указатель на присоединённую пару.
Каждый объект пары MechPair содержит два указателя на присоединённые звенья. В действительности же, для присоединения звена к паре, удобно передавать указатель на объект его подзвена (к которому производится присоединение), а в паре реализовать свойство, дающее указатель на присоединённое звено.
На рис. механизма и рис. структурной схемы каждое звено идентифицируется его номером 0..6, а элементы кинематических пар - буквой A..F той точки, в которой находится этот элемент и условным обозначением типа кинематической пары. Эти обозначения позволяют установить соответствие объектов структуры данных и элементов рисунка структурной схемы.
Структура данных механизма Mechanism (представленная на рис. ниже), по своей сути, представляет собой список указателей на объекты групп кинематических пар MechPGroup. Каждая группа MechPGroup, в свою очередь содержит список указателей подмножество кинематических пар механизма MechPair. Основные связи пар с другими объектами структуры данных механизма уже представлены на предыдущей структурной схеме.
Звено механизма в данном представлении описывается списковой структурой - MechLink, каждый элемент списка которой, SubLink содержит следующие основные поля данных:
- Указатель на объект структурной точки GeomPoint, содержащий координаты этой точки в 3-х мерном пространстве;
- Указатель на объект некоторой кинематической пары MechPair, к которой присоединено данное звено механизма. Причём элемент этой пары располагается в точке данного подзвена;
- Указатель на геометрический объект GeomObject, определяющий визуальное представление данной части звена в структурной схеме.
Использование списков для представления звеньев механизма позволяет описывать структуру и положение основных типов звеньев, которые часто используются в пространственных механизмах (см. таблица 4).
| № | Название | Рисунок звена | Структура данных | Использование объекта |
| 1 |
Звено - крепление |

|
|
Для неподвижного закрепления элементов кинематических пар или других звеньев, за счёт создания составного звена; |
| 2 |
Звено - линейный отрезок |

|

|
Для линейного соединения 2-х элементов кинематических пар; |
| 3 | Звено - ползунок |
|
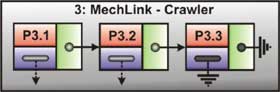
|
В качестве подвижной части, перемещающейся по некоторому другому линейному звену. Всегда соединено с элем-м поступательной кинематической пары; |
| 4 | Звено - ломаная |

|

|
Для линейного соединения 3-х и более элементов кинематич. пар; |
| 5 | Звено - контур |
|
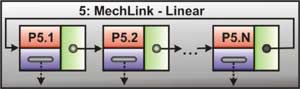
|
Для линейного соединения в контур 3-х и более элементов кинематических пар; |
| 6 | Составное звено |
|
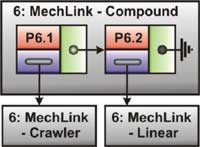
|
Для создания звеньев более сложной структуры, на основе имеющихся звеньев 1-5, путём их объединения; |
На рисунках звеньев красными крестиками отмечены точки, определяющие структуру и положение звена. Каждой такой точке соответствует один элемент списка, названный подзвеном. Синие пунктирные кружки, вокруг некоторых точек, обозначают места возможной привязки элементов кинематических пар. В элементах списка привязке элемента кинематической пары соответствует указатель на соответствующий объект пары.
В последнем случае, для составного звена, указатели элементов списка указывают не на объекты элементов пар, а на другие звенья, объединяемые составным звеном в одно целое.